Quando si esamina un problema di Fisica, è cruciale identificare un sistema di riferimento, al fine di comprendere il modo in cui interagiscono le grandezze vettoriali coinvolte e per stabilire correttamente l’approccio alla soluzione.
Cosa implica esattamente individuare un sistema di riferimento? Praticamente, si devono compiere tre azioni:
- stabilire un punto $O$, definito come origine del sistema di riferimento;
- determinare degli assi lungo specifiche direzioni;
- assegnare un orientamento a ciascuno degli assi.
In alcuni casi, potrebbe essere necessario tracciare un piano cartesiano con due assi $x$ e $y$ orientati, come si fa comunemente in Geometria Analitica.
Il numero di assi del sistema di riferimento varia a seconda del tipo di problema in questione. È importante sottolineare che non vogliamo affrettare le cose e che torneremo più volte su questi concetti; al momento, ci concentriamo sull’idea principale.
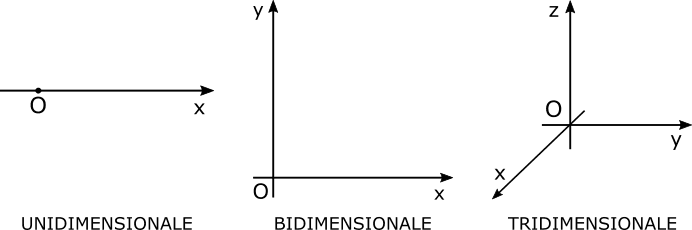
Ad esempio, se ci trovassimo di fronte a un moto rettilineo uniforme o a un moto rettilineo uniformemente accelerato, come quello di un’auto che si sposta lungo una strada retta, sarebbe sufficiente utilizzare un solo asse (sistema di riferimento unidimensionale).
Se invece dovessimo trattare un moto su un piano, come quello delle palle su un tavolo da biliardo, allora avremmo bisogno di un sistema di riferimento bidimensionale, con due assi.
Infine, per descrivere i moti nello spazio, sarebbe necessario utilizzare un sistema di riferimento tridimensionale, con tre assi.
In sostanza, il numero di assi necessari corrisponde al numero di dimensioni coinvolte nel problema che stiamo analizzando. Di solito, indicheremo il primo asse con la lettera x, il secondo con y e il terzo con z.
Come scegliere un sistema di riferimento
All’inizio abbiamo sottolineato l’importanza di definire la direzione degli assi, ma non abbiamo specificato quali direzioni scegliere. Questo significa che gli assi di un sistema di riferimento possono essere disposti e orientati secondo la convenienza: la selezione del sistema di riferimento è arbitraria.
La chiave da tenere presente è che, indipendentemente dalla selezione del sistema di riferimento, l’interpretazione del problema rimane invariata. Ciò che conta è che l’analisi sia coerente con la scelta effettuata.
Naturalmente, alcune scelte possono risultare più pratiche di altre. L’esperienza ci guiderà verso un sistema di riferimento che semplifichi lo studio del problema e agevoli i calcoli.
Esempio sulla scelta del sistema di riferimento in una dimensione
Esaminiamo un esempio semplice per chiarire il concetto. Immaginiamo di avere un treno che viaggia a $100 \mathrm{~km} / \mathrm{h}$ verso destra. Vogliamo rappresentare la sua velocità su un sistema di riferimento adeguato.
La scelta più pratica è adottare un asse parallelo alla direzione del movimento: se il treno si sposta lungo binari orizzontali, allora optiamo per un asse orizzontale. Come discusso in precedenza, possiamo orientare l’asse da sinistra verso destra.
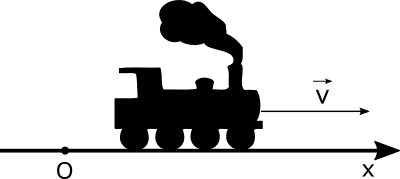
Con questa decisione, tutti i vettori rivolti verso destra, come la velocità del treno, saranno positivi poiché concordano con l’asse, mentre quelli diretti verso sinistra saranno negativi poiché discordano.
Seguendo questa scelta, possiamo dire che il treno ha una velocità di $+100 \mathrm{~km} / \mathrm{h}$.
Ora, invertiamo l’orientamento dell’asse, da destra verso sinistra.
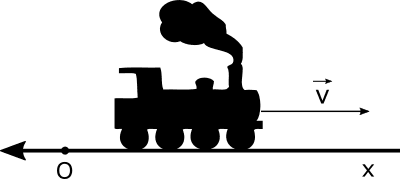
In questo nuovo contesto, i vettori che puntano verso sinistra saranno positivi perché concordano con l’asse. Tuttavia, poiché il treno si muove sempre verso destra, nella nostra nuova rappresentazione la sua velocità sarà espressa come $-100 \mathrm{~km} / \mathrm{h}$, poiché si oppone all’asse.
È importante notare che in entrambi i casi abbiamo fornito informazioni coerenti: il treno si sposta sempre a $100 \mathrm{~km} / \mathrm{h}$ verso destra e l’interpretazione del problema resta la stessa.
È opportuno sottolineare un aspetto che potrebbe generare confusione. Quando abbiamo usato $+100 \mathrm{~km} / \mathrm{h}$ e $-100 \mathrm{~km} / \mathrm{h}$, abbiamo indicato grandezze vettoriali. In modelli unidimensionali, infatti, i vettori possono essere rappresentati come numeri con segno: dato che c’è una sola direzione, basta specificare il valore numerico e indicare il verso con un segno coerente con l’orientamento dell’asse.
Esempi sulla scelta del sistema di riferimento in due dimensioni
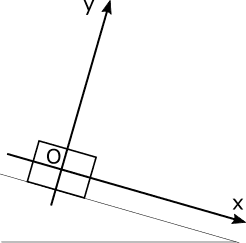
In due dimensioni, il sistema di riferimento più comodo è solitamente quello cartesiano, in cui gli assi x e y sono perpendicolari. Questo sistema può essere adattato anche a inclinazioni diverse dal piano cartesiano tradizionale, con l’asse $x$ orizzontale verso destra e l’asse $y$ verticale verso l’alto, come abbiamo visto in precedenza.
Ad esempio, quando si analizza il moto di un oggetto che scivola lungo un piano inclinato, è più pratico utilizzare un sistema di riferimento in cui l’asse $x$ segue la direzione del piano inclinato e l’asse $y$ è perpendicolare ad esso.
Lo stesso approccio può essere applicato allo studio del moto oscillatorio di un pendolo: è più conveniente adottare un sistema in cui l’asse $y$ coincide con la direzione iniziale del filo e l’asse $x$ è perpendicolare ad esso.
Ancora una volta, si evidenzia che la scelta del sistema di riferimento è arbitraria: possiamo optare per quello che sembra più adatto a semplificare l’analisi dei problemi.
Non c’è nulla che ci impedisca di considerare assi non perpendicolari tra loro, come mostrato in figura.
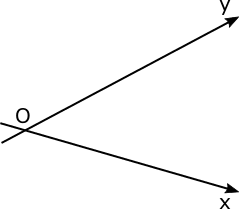
Anche se questa scelta potrebbe sembrare insolita o poco convenzionale, non significa necessariamente che sia sbagliata. Piuttosto, la domanda da porsi è: questa scelta semplifica o complica l’analisi del problema?
Dal momento che tutti i sistemi di riferimento sono validi, potrebbe essere più vantaggioso scegliere quello più semplice.